
Overview
Adding motion to timelapse photography or video can really add an extra dimension of interest. Unfortunately, most commercially available systems cost as much as the camera gear, or more. The goal of this project is to develop a simple pan/tilt rig capable of carrying a digital SLR camera.
This rig will be controlled by the motion rig controller, which also includes a third axis that can be used for controlling a camera dolly. Check out the controller’s project page for more details on how this controller will work.
Mechanical Design
 In order to design this rig, I had to determine a few requirements in order to size the motors, figure out drive train, etc. Now, I’m not a mechanical engineer, but I’ve had a little help and came up with the following:
In order to design this rig, I had to determine a few requirements in order to size the motors, figure out drive train, etc. Now, I’m not a mechanical engineer, but I’ve had a little help and came up with the following:
Payload: I weighed my gear and a maximum of 2kg will cover all my SLR body/lens combinations. I could probably live with 1.5kg but I’d rather play it safe.
Max holding torque: With a balanced payload, the holding torque is minimized, however there will realistically always be some distance between the payload centre of gravity (COG) and the axis of rotation. I will assume 3cm for our calculations.
*The max holding torque will be at 90° from horizontal
Torque = Force * Distance
Torque = 2 * 3cm = 6kg·cm or 83.3oz·in
With that done, I can clearly see that my NEMA 14 stepper motors are not going to cut the mustard. The required torque is about four times their rated maximum holding torque, so some form of gearing reduction is required.
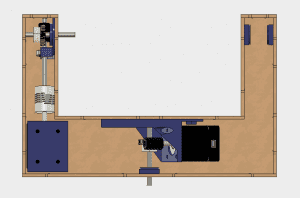
My first prototype of this rig initially used a belt drive with a 3:1 reduction ratio. This was sufficient, but it required the motors to be powered continuously, which requires a large power source.
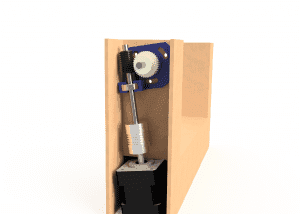 A better option is a worm drive. A worm drive has the added bonus of being self-locking, which means that the payload won’t drop if the motor power is lost. This also means that no power is required to hold a static position. The higher gear reduction also gives more resolution to the positioning accuracy.
A better option is a worm drive. A worm drive has the added bonus of being self-locking, which means that the payload won’t drop if the motor power is lost. This also means that no power is required to hold a static position. The higher gear reduction also gives more resolution to the positioning accuracy.
Electronics
The stepper motors and camera shutter are controlled by a custom control board. The controller uses a micro controller and modular stepper drivers. More details are found on the Motion Controller project page.


